Dynamisches System: System, das einer zeitlichen Änderung unterliegt.
Regelgröße: die zu regelnde Größe.
Systemklassen
Dynamisches System: y(t)=F(u,t)
Statisches System: y(t) hängt nur von u(t) ab: y(t)=F(u(t)). Ein statisches System ist Gedächtnislos
Zeitinvariantes System: Die Übertragungsfunktion F hängt nur indirekt von der Zeit ab. Es hat ein Gedächtnis (das Verschiebungsprinzip ist anwendbar)
Kausales System: Ein System ist kausal, wenn für y(t) und u(τ) gilt τ≤t
Lineares System: Ein System ist linear, wenn beide Prinzipien erfüllt sind:
Superpositionsprinzip: F(u1+u2)=F(u1)+F(u2)
Homogenitätsprinzip: F(ku)=kF(u)
Ruhelage & Linearisierung
Ruhelage
Ausgang soll zu einen konsanten Wert, bzw. Gleichgewichtspunkt gebracht und dort gehalten werden.
In der Ruhelage verändern sich sowohl Ausgänge als auch Eingänge nicht.
Stabilität
Ein stabiles System reagiert auf eine beschränkte Erregung mit beschränkter Bewegung.
System befindet sich in stabiler Ruhelage. | Auslenkung => Rückkehr zur stabilen Ruhelage.
System befindet sich in instabiler Ruhelage. | Auslenkung => Entfernung von instabiler Ruhelage.
Stabilität überprüfen
Mittels Charakteristischen Polynom
Bestimmen der Eigenwerte der DGL über das Charakteristische Polynom
ℜ(λi)<0∀i=> System asymptotisch stabil
ℜ(λi)>0 fu¨r ein i=> System instabil
Grenzstabil falls weder noch
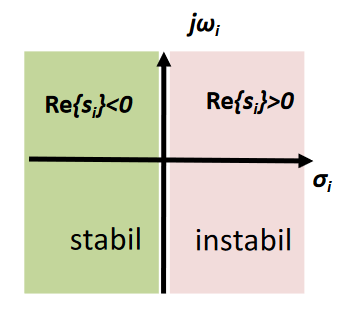
Darstellung in der S-Ebene
Mittels Algebraischen Stabilitätskriterien
Vorzeichenbedingung
Ein Lineares System 2. Ordnung a2y′′+a1y′+a0y=0 mit charakteristischem Polynom a2s2+a1s+a0=0
ist genau dann asymptotisch stabil, wenna0,a1,a2=0 und gleiches Vorzeichen.
Beiwertebedingung
Vorzeichenbedingung ist hinreichend und notwendig für n=2 jedoch nur notwendig für n>2.
Ein Lineares System 3. Ordnung a3y′′′a2y′′+a1y′+a0y=0 mit charakteristischem Polynom a3s3+a2s2+a1s+a0=0
ist genau dann asymptotisch stabil, wenna0a3−a1a2<0 und Vorzeichenbedingung erfüllt ist.
ist genau dann grenzstabil, wenna0a3−a1a2=0 und Vorzeichenbedingung erfüllt ist.
Ein Lineares System 4. Ordnung a4y′′′′a3y′′′a2y′′+a1y′+a0y=0 mit charakteristischem Polynom a4s4+a3s3+a2s2+a1s+a0=0
ist genau dann asymptotisch stabil, wenn
Vorzeichenbedingung erfüllt ist.
a2a3−a1a4>0
a1a2a3−a4a12−a0a32>0
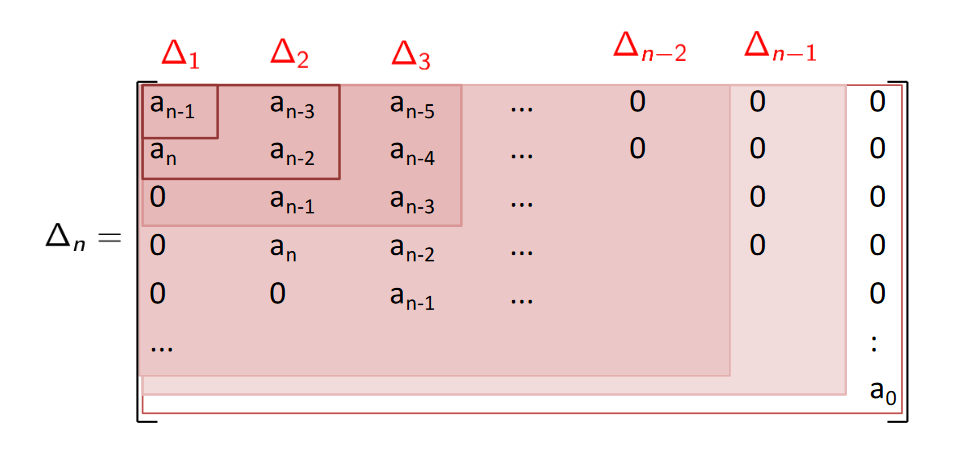
Hurwitzkriterium
Stabilitätsbedingung für Systeme mit Ordnung n.
Ein System any(n)+…+a1y(1)+a0y=0mitan>0 ist aysmptotisch stabil <=>
Deteminante der Hurwitzmatrix ∣Δn∣>0.
alle Hauptabschnittsdeterminanten ∣Δn−1∣,∣Δn−2∣,...,∣Δ1∣ ebenfalls positiv.
Hauptabschnittsdeterminanten
Zustandsraumdarstellung (ZRD)
Nichtlineare Eingangs-/Ausgangs-Form => Linearisierung um Ruhelage => Transformation in Zustandsraumdarstellung.
ZRD ist äquivalente Darstellung als System von n DGLs mit Ordnung 1.
=> Simulation, Analyse, Synthese leichter.
Überführung in ZRD
Einführen von Zustandsvariablenx1, ..., xn in Abhängigkeit von y, y′, ..., y(n)
Jede Zustandsvariable ableiten.
Abgeleiteten Zustandsvektor in Abhängigkeit von Zustandsvariablen ausdrücken.
Linearisierung der ZRD
Linearisierung geschieht mit 1. Glied der Taylorreihe um Ruhelage xs,us.
Mit Bezeichnungen Matrizen A, B, C, D ist auch folgende Darstellung möglich:
x′=A⋅x+B⋅u
y′=C⋅x+D⋅u
Stabilität in ZRD
Lineares System ist asymptotisch stabil <=> ℜλi<0∀i.
Lineares System ist instabil <=> ℜλi>0fu¨r min. ein i.
Lineares System ist grenzstabil <=> ℜλi=0 für genau ein i.
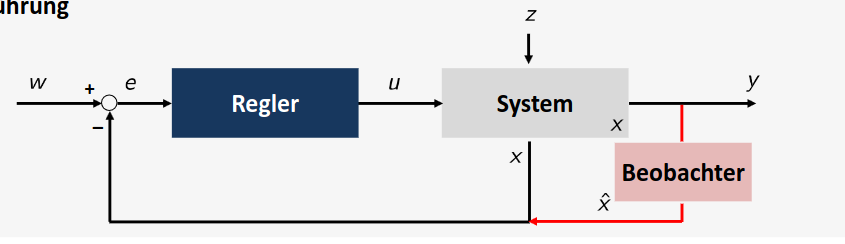
Steuerbares System
Ein System heißt vollständig steuerbar, wenn es für jede Anfangsbedingung x(t0) eine Steuerfunktion u(t) gibt,
so, dass das System in endlicher Zeit in einen beliebigen Endpunkt x(te) überführt werden kann.
Ein System A,b ist genau dann steuerbar, wenn eine der folgenden Bedingungen zutrifft:
det(P)=0
P hat vollen Rang
P:=[bAbA2b⋯An−1b]
Für steuerbare Systeme sind all Polle mittels Zustandsrückführung beliebig veränderbar
=> Der geschlossene Regelkreis kann immer stabilisert werden
Hierfür müssen jedoch alle Zustände bekannt sein
Zustandsrückführung
Für ein lineares steuerbares System in ZRD kann Polvorgabe mittels Zustandsrückführung geschehen
System in ZRD:
x′=A⋅x+b⋅u (1)
y=cT⋅x+d⋅u
Lineare Rückführung der Zustände
u:=kT⋅e=kT⋅(w−x)
Einsetzen in (1) liefert:
x′=(A−b⋅kT)x+b⋅kT⋅w
Wobei (A−b⋅kT)x die Systemmatrix des geschlossenen Regelkreises darstellt
Um die Pole zu verschieben müssen die Koeffizinenten ki richtig gesetzt werden
Charakteristisches Polynom der neuen Systemmatrix aufstellen
det(λI−(A−b⋅kT))
Sollpolynom mit korrekten Polstellen aufstellen
(λ−λ1)⋅(λ−λ2)⋅…⋅(λ−λn)
Koeffizientenvergleich durchführen um ki zu bestimmen
DSS
Siehe DSS Formelsammlung.
Übertragungsfunktion
Beschreibt das Verhalten vom Eingang auf den Ausgang im Frequenzbereich.
G(s)=U(s)Y(s)
Stabilität der Übertragungsfunktion
Pole der Übertragungsfunktion bestimmen Stabilität des Systems.
Alle Polstellen haben negativen Realteil => System stabil.
Es existiert ein Pol mit positivem Realteil => System instabil.
Ex existiert genau ein Pol mit Realteil = 0 und alle weiteren Pole haben negativen Realteil => System ist grenzstabil.
Notwendige Bedingung für Stabilität
Charakteristisches Polynom des Nennerpolynoms ist Nennerpolynom = 0 muss aufgestellt werden.
alle ai=0 und haben gleiches Vorzeichen. (VZB)
Hinreichende Bedingungen für Stabilität bei bestimmtem Grad
Charakteristisches Polynom hat Grad 2:
VZB
Charakteristisches Polynom hat Grad 3:
VZB
a0a3−a1a2<0
Charakteristisches Polynom hat Grad 4:
VZB
a2a3−a1a4>0
a1a2a3−a4a12−a0a32>0
Minimalphasigkeit der Übertragungsfunktion
Nullstellen der Übertragungsfunktion bestimmen Minimalphasigkeit des Systems.
Alle Nullstellen haben negativen Realteil => System ist minimalpahsig.
Notwendige Bedingung für Minimalphasigkeit
Charakteristisches Polynom, also Zählerpolynom = 0 muss aufgestellt werden.
alle ai=0 und haben gleiches Vorzeichen.
Frequenzgang
Frequenzgang beschreibt Verhalten des Systems auf sin/cos Signale.
Antwort auf sin/cos Signal beschreibt das System vollständig.
Für Frequenzgang wird G(s)=G(σ+jω) zu G(s)=G(jω)
=> Betrachten Übertragungsfunktion für rein imaginäre Eingänge, bildet aber trotzdem in die ganze komplexe Eben ab: jω↦C
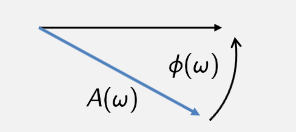
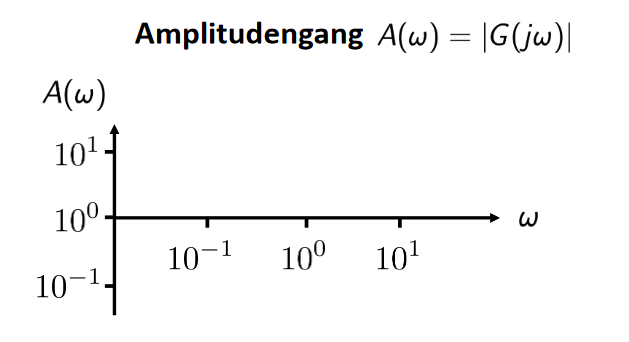
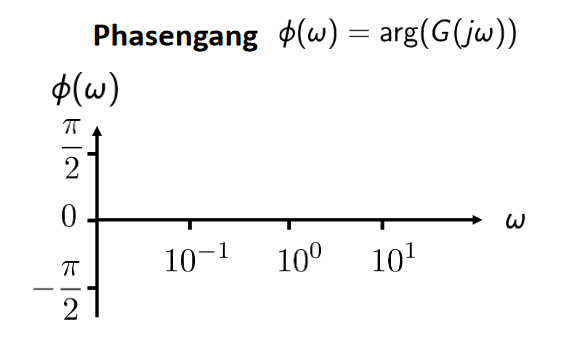
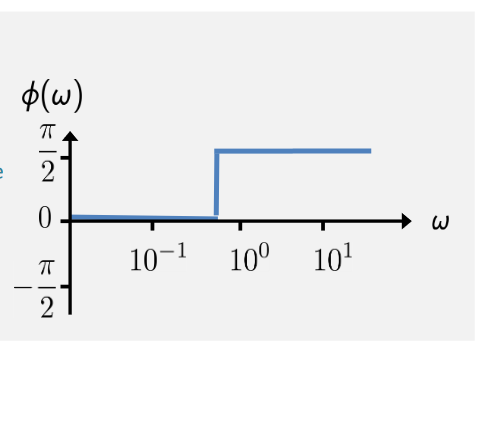
Amplituden- und Phasen-Gang
G(jω)=ℜ(ω)+jℑ(ω)=A(ω)⋅ejϕ(ω)
A(ω)=∣G(jω)∣=ℜ(ω)2+ℑ(ω)2
ϕ(ω)=arg(G(jω))=arctan2(ℜ(ω)ℑ(ω))
arctan2:R2∖{(0,0)}→[−π,+π] oder [−π,+π[(x,y)↦⎩⎨⎧arctan(xy)arctan(xy)+π±πarctan(xy)−π+2π−2πfu¨r x>0 (Quadranten I und IV)fu¨r x<0,y>0 (Quadrant II)fu¨r x<0,y=0 (oberer / unterer Rand)fu¨r x<0,y<0 (Quadrant III)fu¨r x=0,y>0fu¨r x=0,y<0
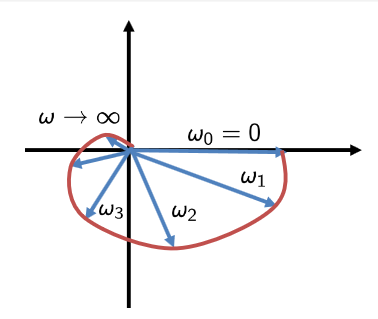
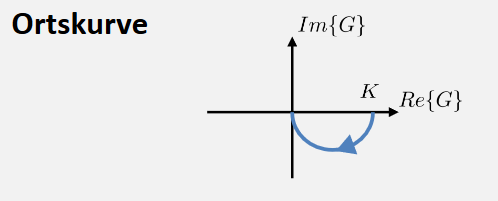
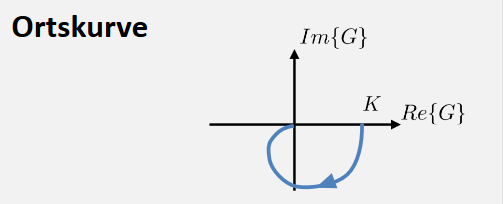
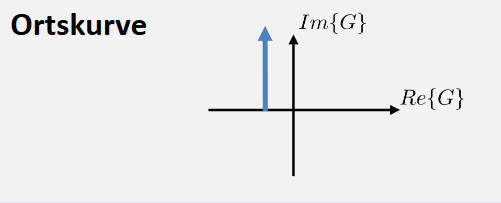
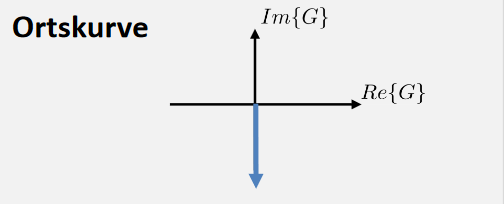
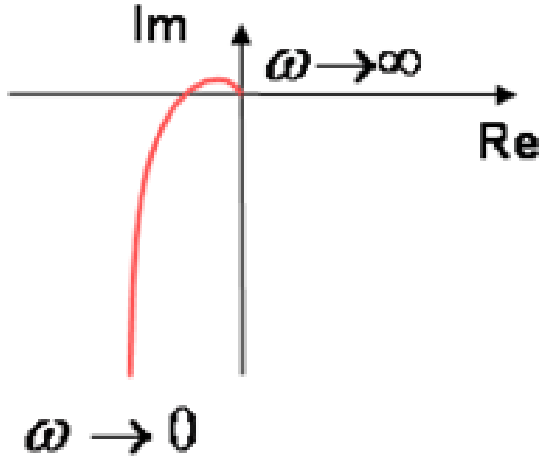
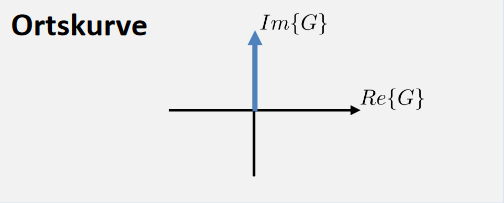
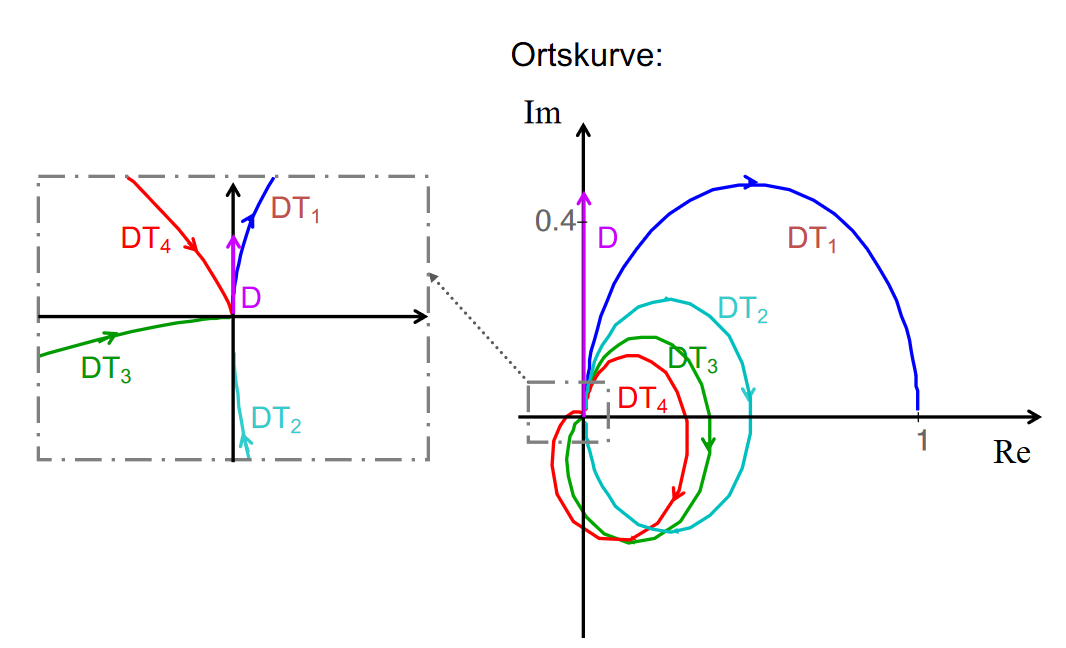
Ortskurve | Nyquist-Diagramm
Die Ortskurve vereinigt den Amplituden- und Phasen-Gang in einer graphischen Darstellung.
Die Übertragungsfunktion G(jω) wird von ω=0 bis ω→∞ ausgewertet und in der komplexen Ebene gezeichnet.
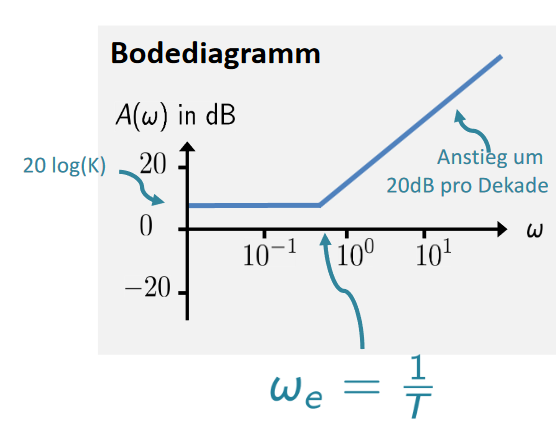
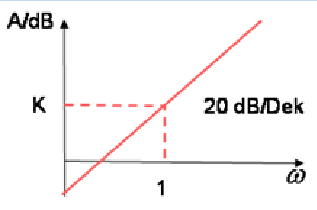
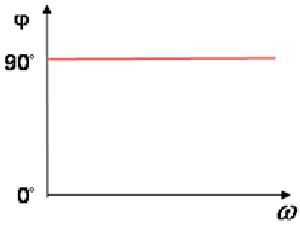
Bode-Diagramm
Das Bode-Diagramm trennt Amplitudengang und Phasengang in zwei graphischen Darstellung auf.
Wichtige Übertragungsfunktionsglieder
Eckfrequenz:ω0=T01
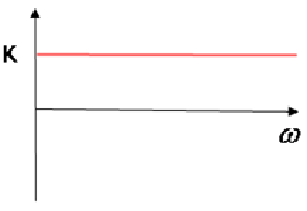
Proportionalglied P
G(s)=K
G(jω)=K
A(ω)=K
φ(ω)=0
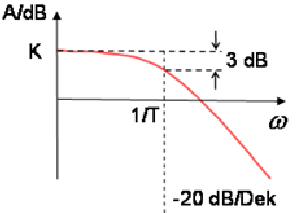
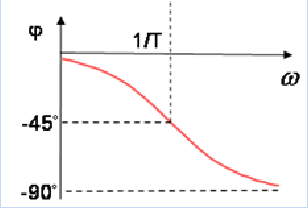
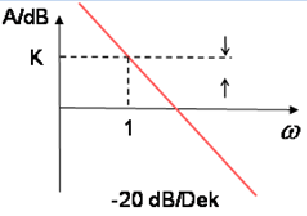
Verzögerungsglied PT1
G(s)=sT+1K
T: Zeitkonstante
G(jω)=jωT+1K
A(ω)=1+T2ω2K
φ(ω)=−arctan(Tω)
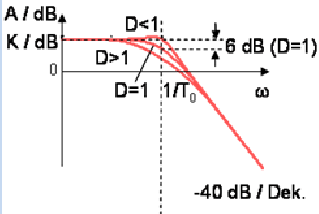
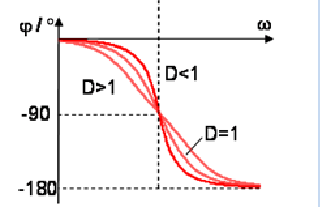
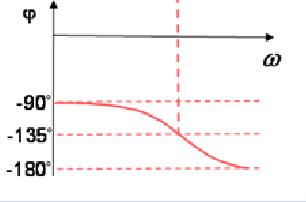
Verzögerungsglied PT2
G(s)=T02s2+2DT0s+1K
D: Dämpfungsgrad
T0: Zeitkonstante
G(jω)=1−T02ω2+2jDT0ωK
A(ω)=(1−T02ω2)2+(2DT0ω)2K
φ(ω)=−arctan(1−T02ω22DT0ω) fu¨r ω<T01
φ(ω)=−arctan(1−T02ω22DT0ω)−π fu¨r ω>T01
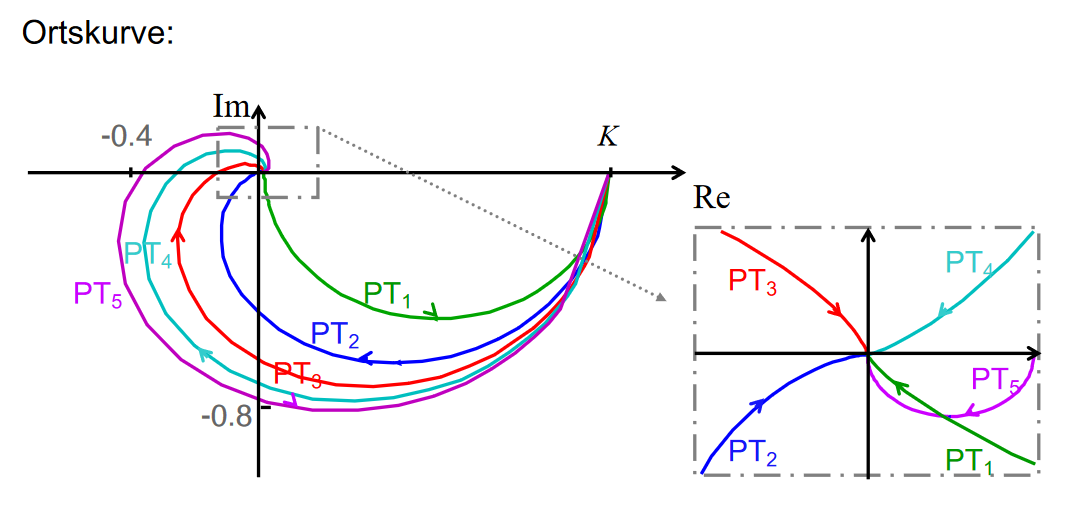
PTn-Glied
G(jω)=(T1jω+1)nK
PD-Glied
G(jω)=K(jωT+1)
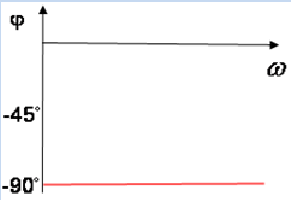
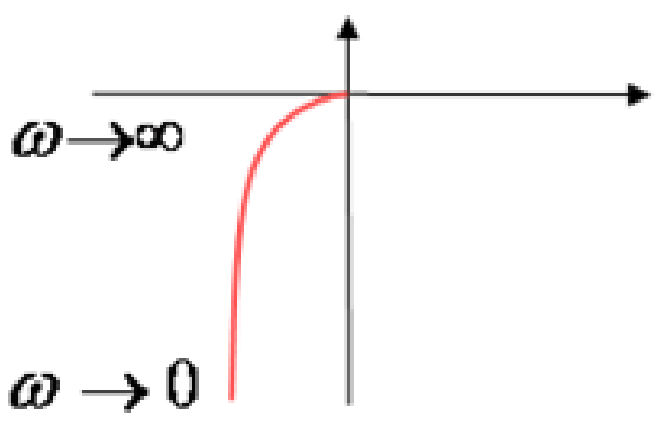
Integralglied I
G(s)=sK
G(jω)=jωK=−jωK
A(ω)=ωK
φ(ω)=−2π
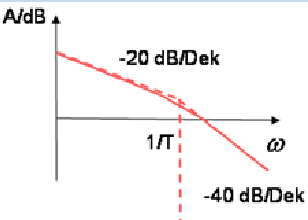
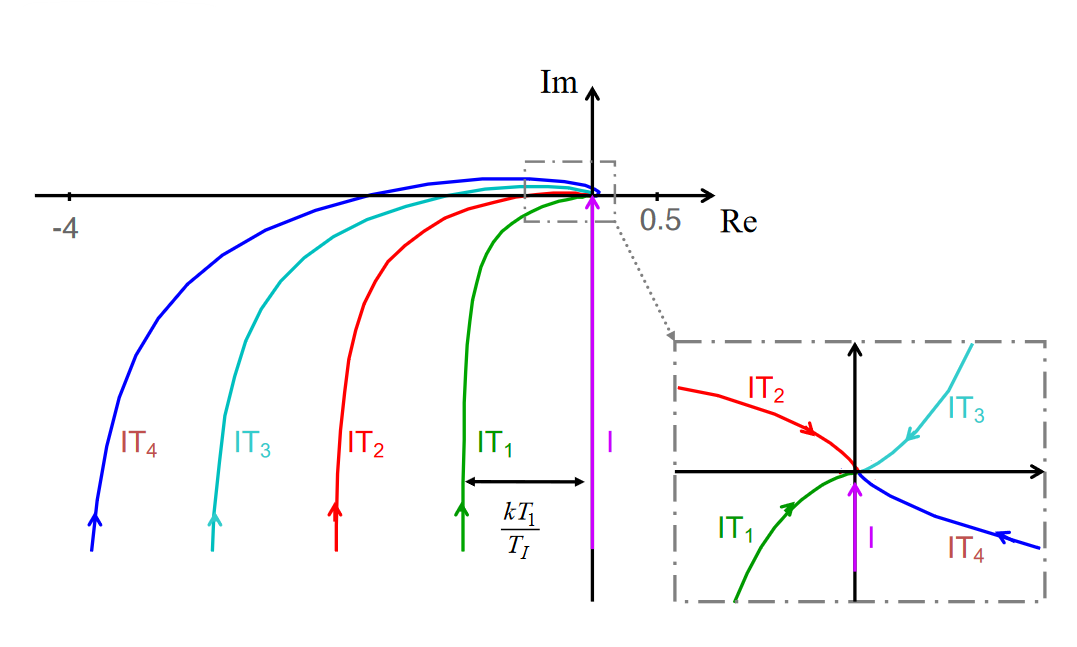
IT1-Glied
G(s)=s(sT+1)K
G(jω)=jω(1+jTω)K
A(ω)=ω1+T2ω2K
φ(ω)=−2π−arctan(Tω)
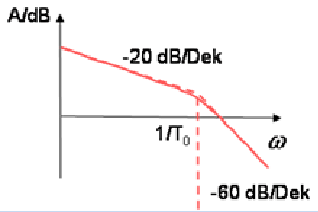
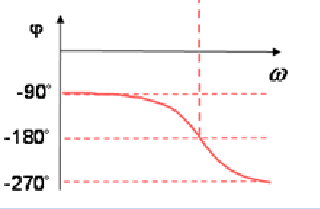
IT2-Glied
G(s)=s(T02s2+2DT0s+1)K
G(jω)=jω(1−T02ω2+j2DT0ω)K
A(ω)=ω(1−T02ω2)2+(2DT0ω)2K
φ(ω)=−arctan(1−T02ω22DT0ω)−2π fu¨r ω<T01
φ(ω)=−arctan(1−T02ω22DT0ω)+2π fu¨r ω>T01
ITn-Glied
G(jω)=jω(T1jω+1)nK
Differenzierglied D
G(s)=Ks
G(jω)=jKω
A(ω)=Kω
φ(ω)=2π
DTn-Glied
G(jω)=TIjω(jω+1)njω
Asymptotisches Zeichnen des Bode-Diagramms
1. Zerlegen der Übertragungsfunktion
Auf Grund der logarythmischen Darstellung werden alle Einzellkomponenten im Bodediagramm einfach zueinander addiert.
Es gilt: ωE1<ωE2<ωE3<…
2. Bestimmen der Anfangsamplitude
Die Anfangsamplitude ist der Schnittpunkt mit der y-Achse und wird immer so gewählt das gilt ω<<ωE1.
Existieren nur PTn Glieder ist die Anfangsamplitude gleich K.
Existiert auch ein I oder D Anteil muss eine Punktprobe durchgeführt werden.
3. Bestimmen der Anfangssteigung
Existieren nur PTn Glieder ist die Anfangssteigung gleich 0 bis zu ωE1.
Existiert ein I Anteil so ist die Steigung −20db/Dekade bis zu ωE1.
Existiert ein D Anteil so ist die Steigung +20db/Dekade bis zu ωE1.
4. Asymptotischer Amplitudenverlauf
Pole und Nulstellen verändern den asymptotischen Verlauf.
Reeler Pol: erniedrigt Steigung um 20db/Dekade bei ωEi.
Konjugiert komplexer Pol: erniedrigt Steigung um 40db/Dekade bei ωEi.
Reelle Nullstelle: erhöht Steigung um 20db/Dekade bei ωEi.
Konjugiert komplexes Nullstellenpaar: erhöht Steigung um 40db/Dekade bei ωEi.
5. Bestimmen des Phasenverlaufs
Für minimalphasige Systeme besteht ein direkter Einfluss vom Amplitudengang zum Phasengang.
Veränder sich die Steigung um 20dB im Amplitudengang an einer Eckfrequenz ωEi so veränder sich der Phasengang um 2π ebenfalls bei ωEi
Das Vorzeichen der Veränderung ist für
Rel(Pi<0) gleich wie im Amplitudengang.
Rel(Pi>0) mal (-1) wie im Amplitudengang.
Bei negativem Verstärkungsfaktor verschiebt sich der ganze Phasengang um −π.
Reglerentwurf
Nomineller Regelkreis
Der nominelle Regelkreis beschreibt den idealen Regelkreis. Es existieren keine Ein- und Ausgangsstörungen, kein Messrauschen und keine Modellunsicherheiten.
Stabilitätsuntersuchung über Pole
Die Stabilität des nominellen Regelkreises kann über die Pole der charakteristischen Gleichung bestimmt werden.
Es ist jedoch schwer den Einfluss des Reglers K(s) auf die stabilität des gesammten Regelkreises zu bestimmten. Dies erschwert den Reglerentwurf.
Stabilitätsuntersuchung mittels Nyquist-Kriterium
Das Nyquist-Kriterium ist ein notwendiges und hinreichendes Kriterium für die Stabilität des geschlossenen Regelkreises unter beobachtung des offenen Regelkreises G0(s)=K(s)⋅G(s). Dies vereinfacht die Stabilitätsbestimmung.
Nach dem Nyquist-Kriterium ist der geschlossene Regelkreis stabil, genau dann wenn Δϕ=m0π+2a0π wobei
m0 ist die Anzahl aller Pole von G0(s) in der rechten Halbebene.
a0 ist die Anzahl aller Pole von G0(s) auf der Imaginärachse.
Δϕ ist der gesamte überstrichene Winkel ausgehend vom kritischen Punkt in Richtung positivem ω | Gegen den Uhrzeigesinn positiv gezählt.
Spezialfall: Linke-Hand Regel
Ist G0(s) asymptotisch stabil d.h., G0(s) hat nur Pole in der linken Halbebene, dann ist der geschlossene Regelkreis ebenfalls asymptotisch stabil, genau dann wenn der kritische Punkt immer links der Ortskurve in Richtung wachsendem ω liegt.
Spezialfall: Erweiterte Linke-Hand Regel
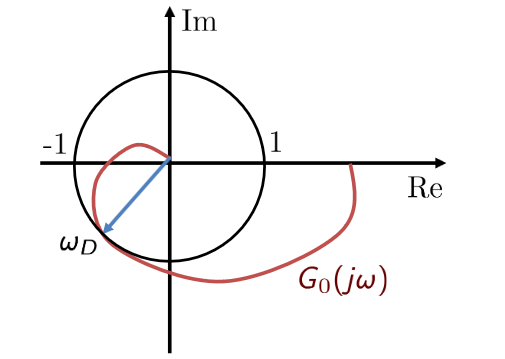
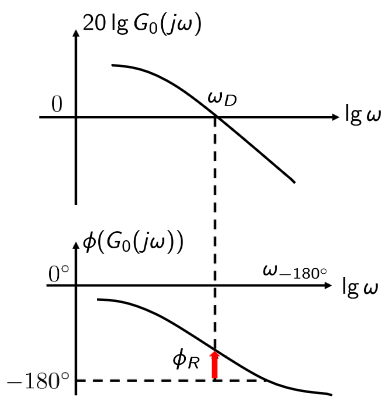
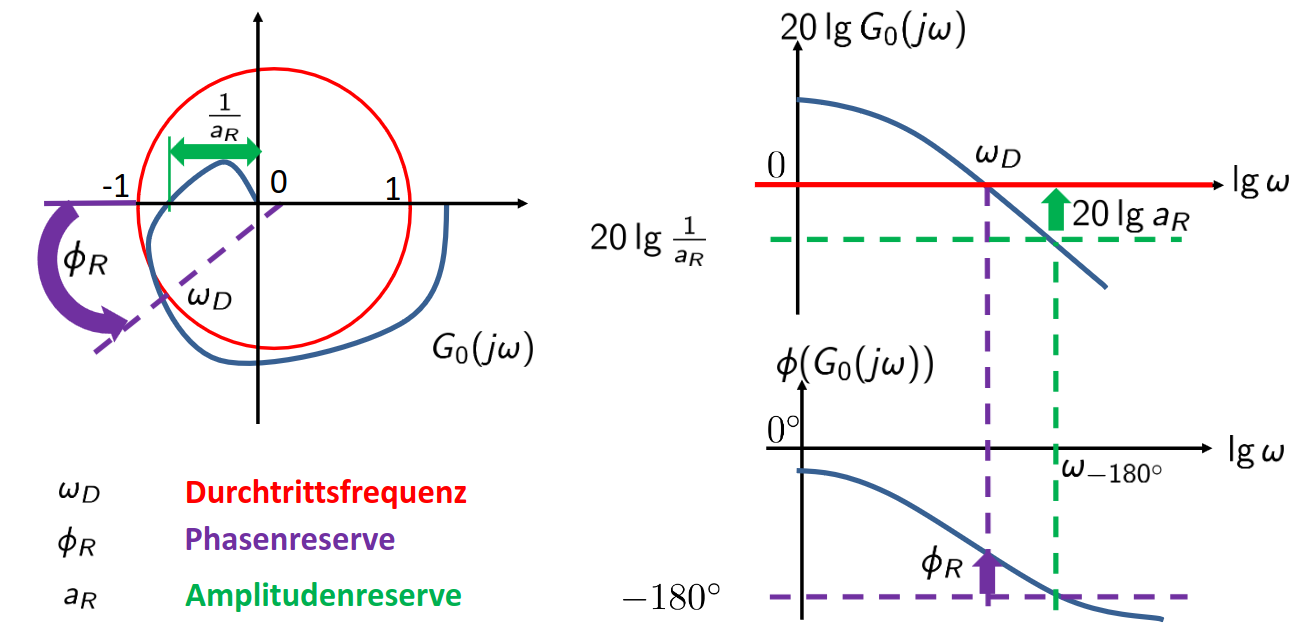
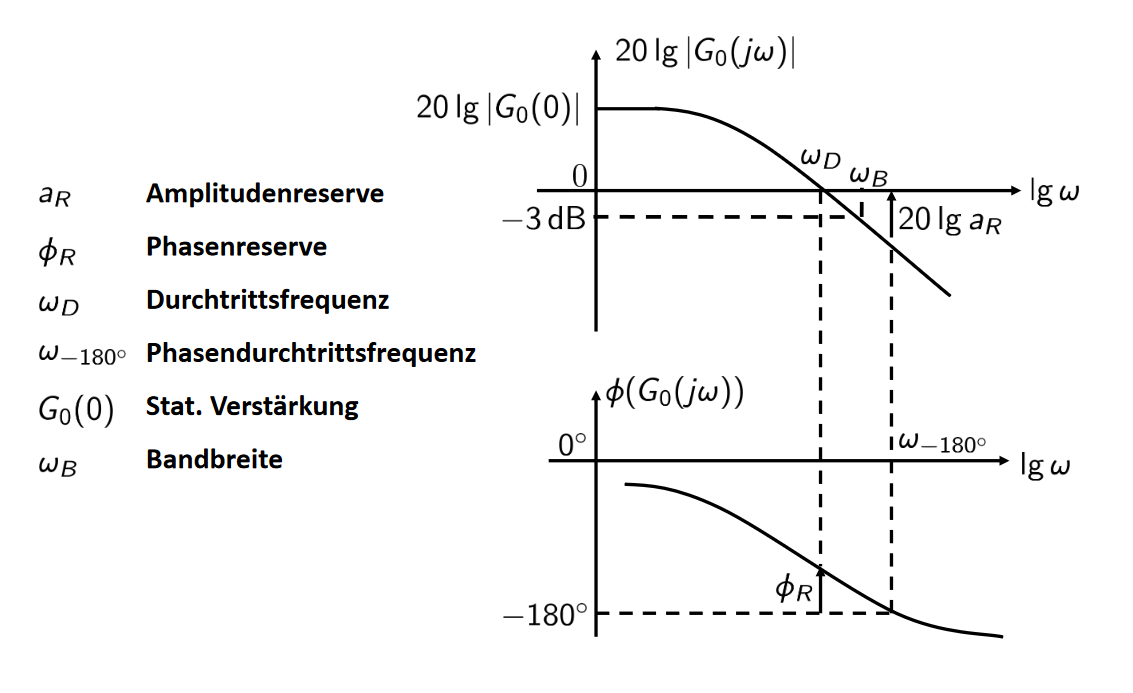
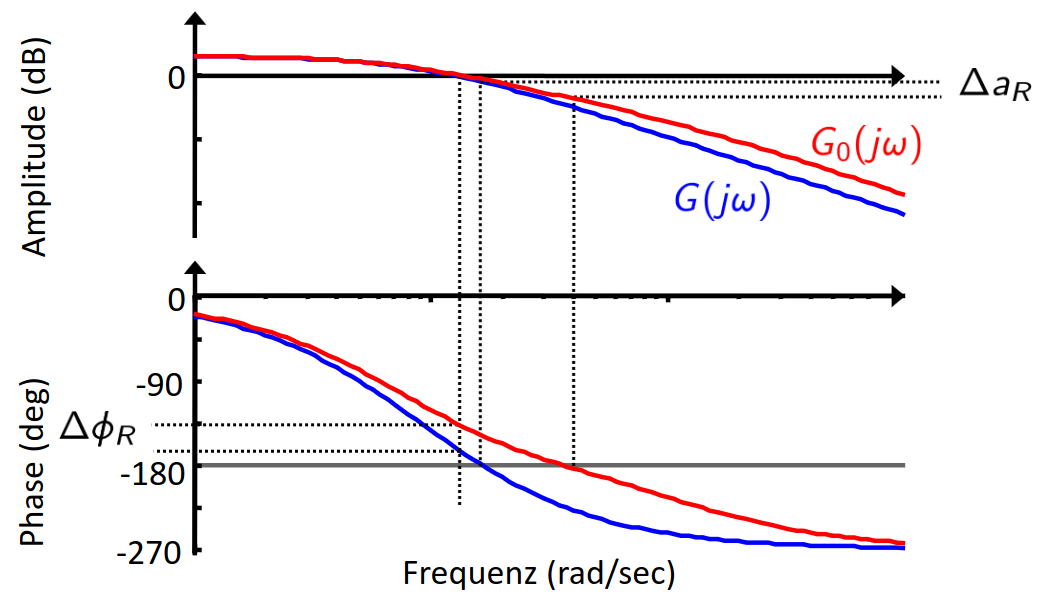
Hat der offene Regelkreis G0(s) nur Pole in der linken Halbebene mit Ausnahme eines einfachen oder doppelten Pols im Ursprung, dann ist der geschlossene Regelkreis genau dann asymptotisch stabil, wenn die Ortskurve G0(jω) für die Durchtrittsfrequenz ωD einen Phasenwinkel größer als −180° hat.
Die Durchtrittsfrequenz ωD ist die Frequenz bei der das System eine Verstärkung von 1, bzw 0dB aufweist.
Sie kann in der Ortskurve anhand des Schnittpunktes mit dem Einheitskreis bestimmt werden.
Wobei eine Darstellung im Bodediagramm ebenfalls möglich ist.
Spezialfall: Small-Gain-Theorem
Ist G0(s) asymptotisch stabil d.h., G0(s) hat nur Pole in der linken Halbebene und ∣G0(jω)∣<1∀ω, dann ist auch der geschlossene Regelkreis asymptotisch stabil.
Anschaulich bedeutet das, dass die Verstärkung des Systems nie größer 1 ist. Die Ortskurve des Systems liegt vollständig im Einheitskreis.
Nur hinreichendes, nicht notwendiges Kriterium.
Robuste Stabilität
Ein geschlossener Kreis ist robust stabil, wenn der geschlossenen Regelkreises trotz (kleiner) Änderungen der Strecke/des Modells stabil bleibt.
Interne Stabilität
Definition
Der Standartregelkreis heißt intern asymptotisch stabil, wenn die Übertragungsfunktionen von jeder externen Eingangsgröße auf jede andere Größe im Regelkreis asymptotisch stabil sind.
Satz
Der Standardregelkreis ist intern asymptotisch stabil, wenn
Der geschlossene Kreis asymptotisch stabil ist. ∧
Keine instabilen Übertragungsfunktionen außerhalb des Kreises auftreten. ∧
In sich keine instabilen Pol-Nullstellen kürzen.
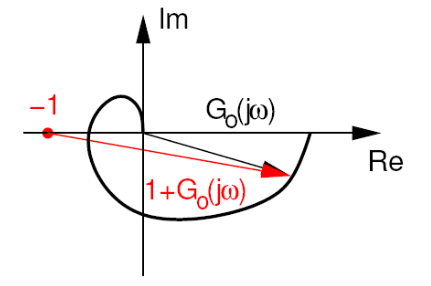
Amplituden- und Phasenreserve
Die Amplitudenreserve gibt an wie weit die Verstärkung des System erhöht werden kann, ohne, dass das System instabil wird.
Sie wird berechnet mit aR=ad1 wobei ad der Abstand vom Nullpunkt bis zum 180° Punkt der Ortskurve ist.
Die Phasenreserve gibt an wie viel zusätzliche Phasenverschiebung eintreten kann, ohne, dass das System instabil wird.
Sie wird berechnet indem die Druchtrittsfrequenz ωD in den Phasengang eingesetzt, und das Ergebnis zu 180° addiert wird.
Vernünftige Werte
Amplitudenreserve sollte zwischen 2,5dB und 10dB liegen.
Phasenreserve sollte über 30 Grad liegen.
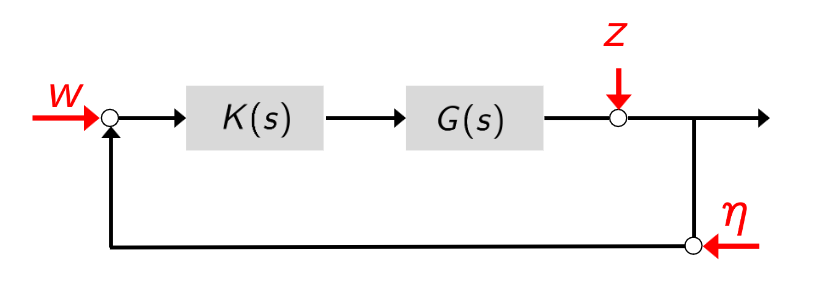
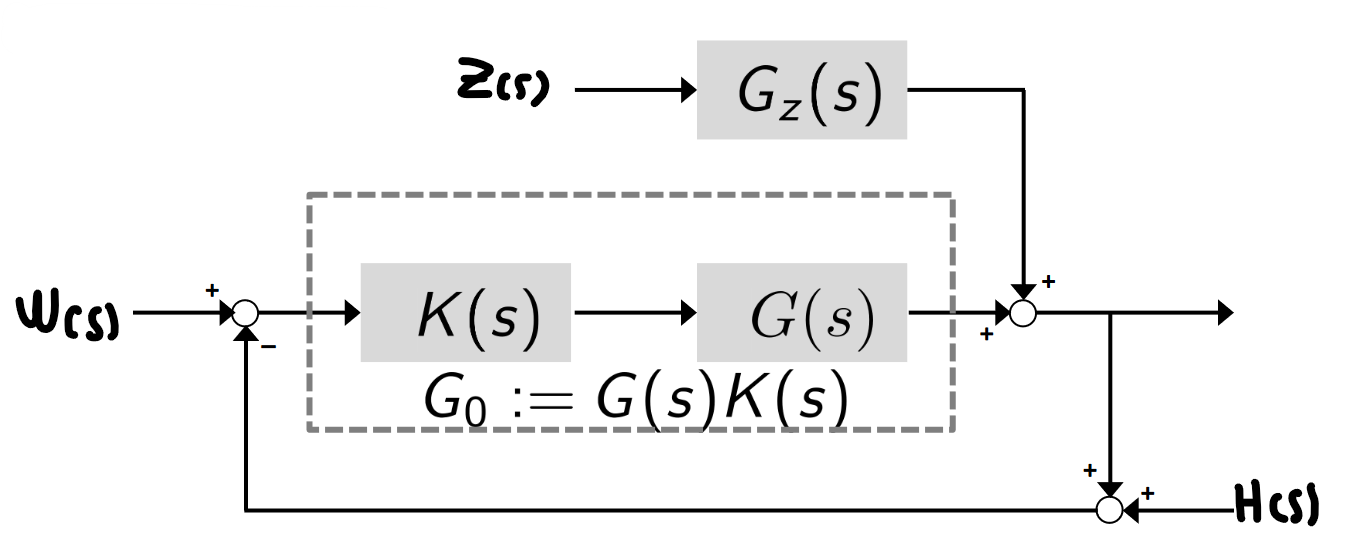
Allgemeiner Regelfehler im Geschlossenen realen Kreis
Der Regelfehler E(s)=W(s)−Y(s) kann mit Hilfe Der Abb. aufgeteilt werden.
der Fehler e im Bezug auf die Führungsgröße W soll möglichst klein sein. Dies gewähreistet ein gutes Führungsverhalten
eW(jω)=S(jω)W(jω)
=> Damit eW(jω) klein wird muss ∣S(jω)∣∀ω klein werden.
der Fehler e im Bezug auf die Störgröße Z soll möglichst klein sein. Dies gewähreistet ein gutes Störverhalten
eZ(jω)=−Gz(jω)S(jω)Z(jω)
=> Damit eZ(jω) klein wird muss ∣S(jω)∣∀ω klein werden.
der Fehler e im Bezug auf die Rauschgröße η soll möglichst klein sein. Dies gewähreistet ein niedgiges Messrauschen
eη(jω)=T(jω)W(jω)
=> Damit eη(jω) klein wird muss ∣T(jω)∣∀ω klein werden.
Fundamentaldilemma
S(s) und T(s) addieren sich zu eins da 1+G0(s)11+G0(s)G0(s)=1
=> S(s) und T(s) können nicht gleichzeigit klein werden.
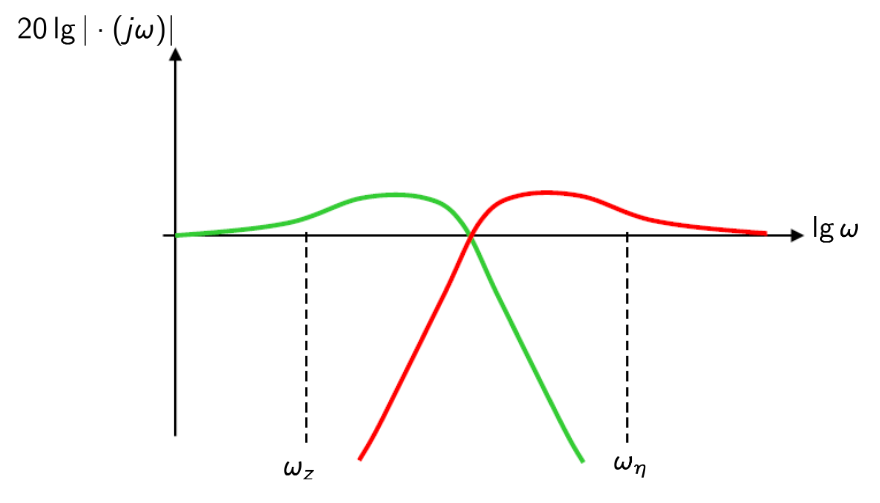
"Lösung" des Fundamentaldilemmas
Führungssignal W(s) und Störsignale Z(s) oft niederfrequent während Messrauschen η(s) meist hochfrequent.
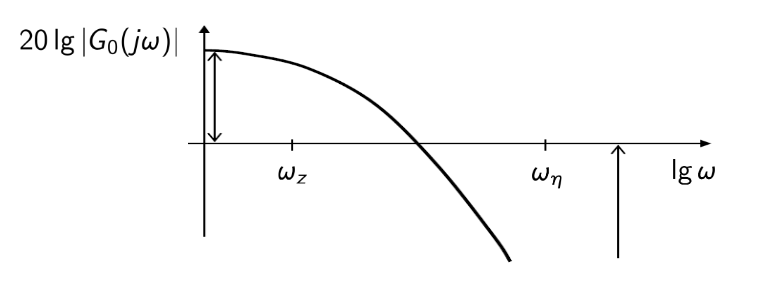
=> Wahl des Regelkreises so, dass ∣S(jω)∣≪1 wenn ω klein und ∣T(jω)∣≪1 wenn ω groß
∣S(jω)∣≪1 fu¨r 0≤w≤ωZ
∣T(jω)∣≪1 fu¨r ωη≤ω≤∞
Ein beispielhafter Verlauf von S(jω) und T(jω) hier hier gezeigt:
Da S(jω)=1+G0(jω)1 wird G0(jω) groß wenn S(jω) klein wird.
Da T(jω)=1+G0(jω)G0(jω) wird G0(jω) klein wenn S(jω) klein wird.
=> Es ergbit sich folgendes Tiefpassverhalten:
Niedrige Frequenzen werden verstärkt.
Hohe Frequenzen werden unterdrückt.
Bandbreite
Die BandbreiteωB ist die Frequenz bei der die Verstärkung -3dB beträgt. Also 20lg∣G0(jωB)∣=−3dB.
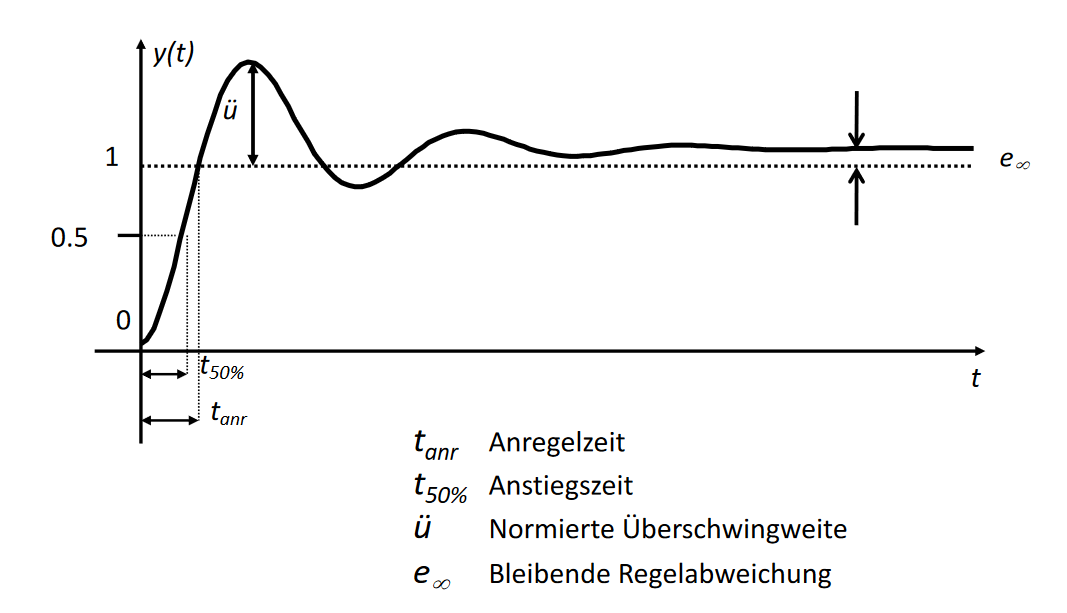
Bleibende Regelabweichung
Auch bei störungsfreier Betrachtung kann es zu einer bleibenden Regelabweichung kommen.
=> Lösung: Der offene Regelkreis sollte stets ein I Glied aufweisen (Geg. dem Regler hinzufügen).
Wichtige Kenngrößen
Reglerentwurf
PID Regler
KPID(s)=Kp(1+Tds+TIs1)
PID Regler - Parameterwahl
verschiedene Ansätze möglich
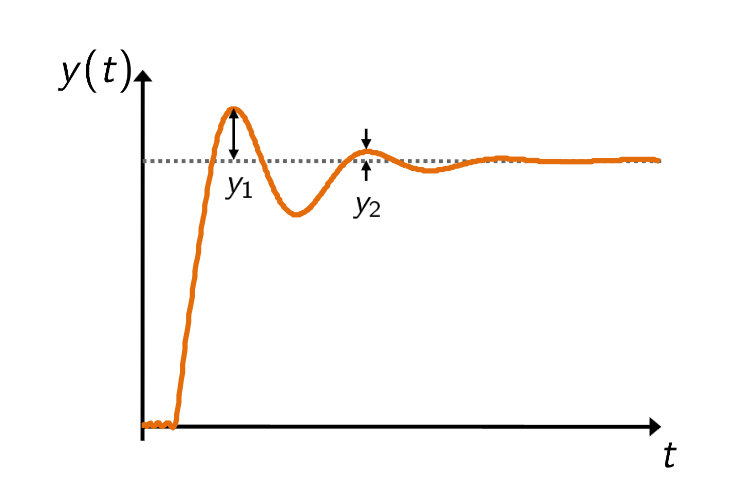
Sprungmethode nach Ziegler-Nichols
Voraussetzungen
Regelstrecke stabil.
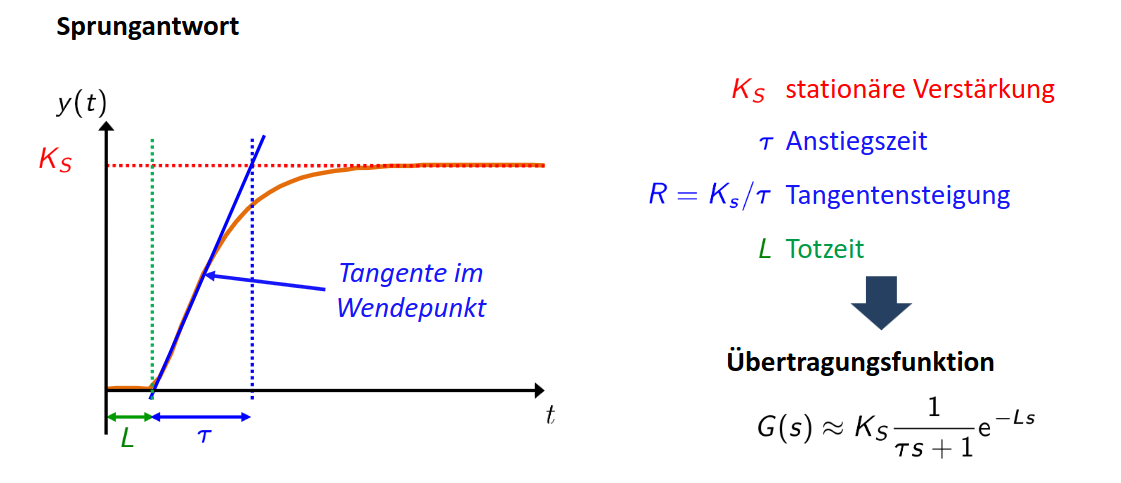
Streckensprungantwort zeigt PT1Tt verhalten.
Vorgehen
Regelziel: Amplitudenverhältnis im geschlossenen Kreis a=y1y2>0.25.
Aus Sprungantwort kann Übertragungsfunktion der Regelstrecke angenäher werden.
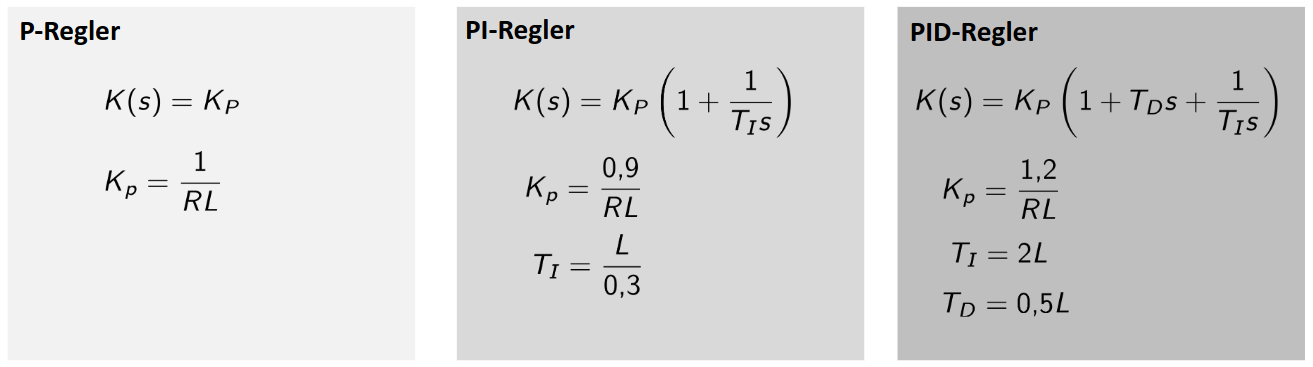
Je nach dem welcher Regeltyp gewählt wird ergeben sich folgende empirisch bestimmten Parameter für den Regler:
Pros & Cons
(+) schnell und einfach
(+) guter Startwert für manuelles Tuning
(-) geringe Robustheit
(-) keine hohe Regelgüte erreichbar
(-) nicht anwendbar bei L>τ
Einstellregeln verlieren zunehmend an relevanz.
Reglerentwurf anhand des offenenen Kreises
Da sich viele Anforderungen an den geschlossenen, bereits am offenen Kreis G0(s) prüfen lassen, können Regelparameter auch anhand G0(s) bestimmt werden.
Loop-Shaping
Gegeben: Regelstrecke G(s) & Wunschverhalten des offenen Kreises.
Gesucht: Regler K(s).
=> Iteratives Entwerfen von K(s) mit Bode-Diagramm im Baukastenprinzip.
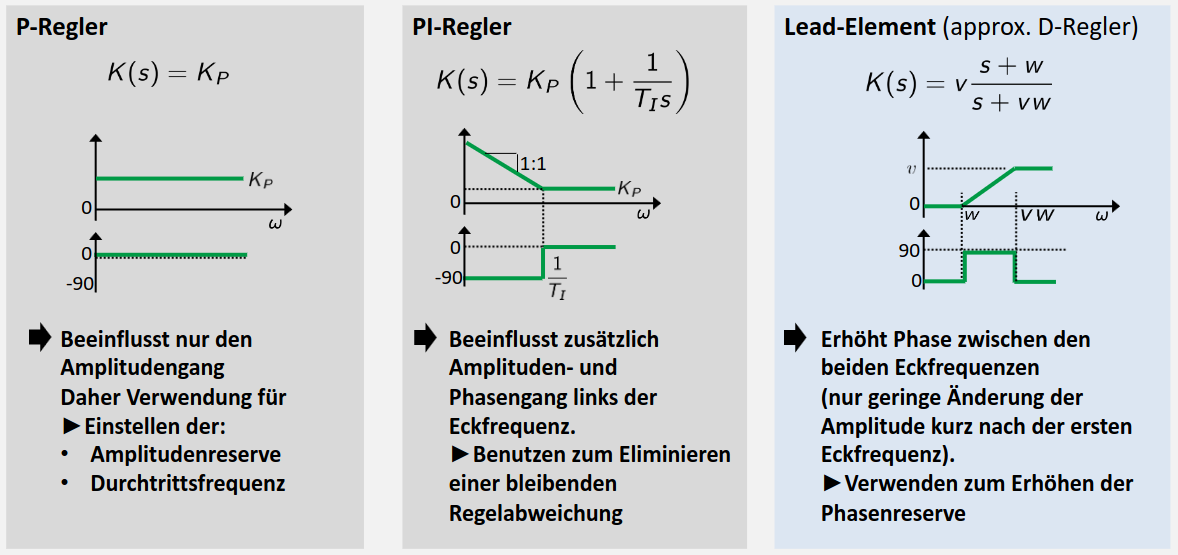
Basiselemente für das Loop-Shaping
P-Regler
K(s)=KP
KP verschiebt Amplitudengang nach
KP>1: oben
0<KP<1: unten
Keinen Einfluss auf den Phasengang.
Grenzwert für KP ist Amplitudenreserve: KP,max=aR.
PI-Regler
K(s)=KP(1+TIs1)
I Anteil: Robuste Garantie gegen bleibende Regelabweichung
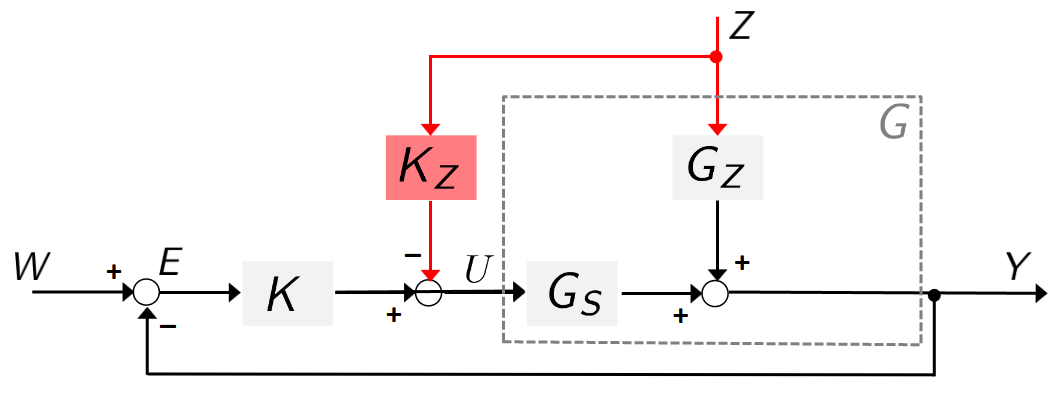
Falls Störung Z nicht direkt gemessen werden kann, kann Störung stattdessen auf der Strecke gemessen werden. Dies sollte möglichst nah am Einflusspunkt der Störung getan werden.